Un piano c'est sympa mais ça prend de la place alors pourquoi ne pas en créer un invisible ? Pour se faire on utilisera une carte arduino et un capteur, facile non ?

Difficulté
Technique
Durée
1 heure(s)
- Matériel et outils
Buzzer 

Certains nécessitent une tension continue, d'autres nécessitent une tension alternative. Cette page recense les types de buzzer les plus répandus.
Pourquoi ne pas réaliser la fiche expérience pour Wikidébrouillard !
Arduino 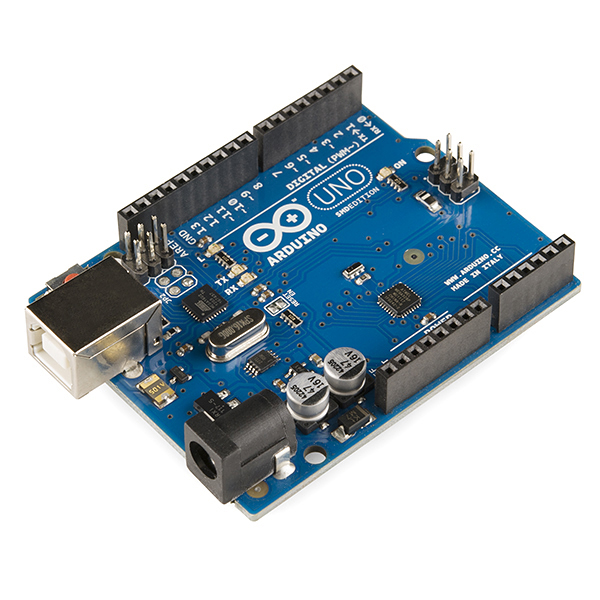

Arduino, et son synonyme Genuino sont des micro-controleurs libres.
Logiciel Arduino 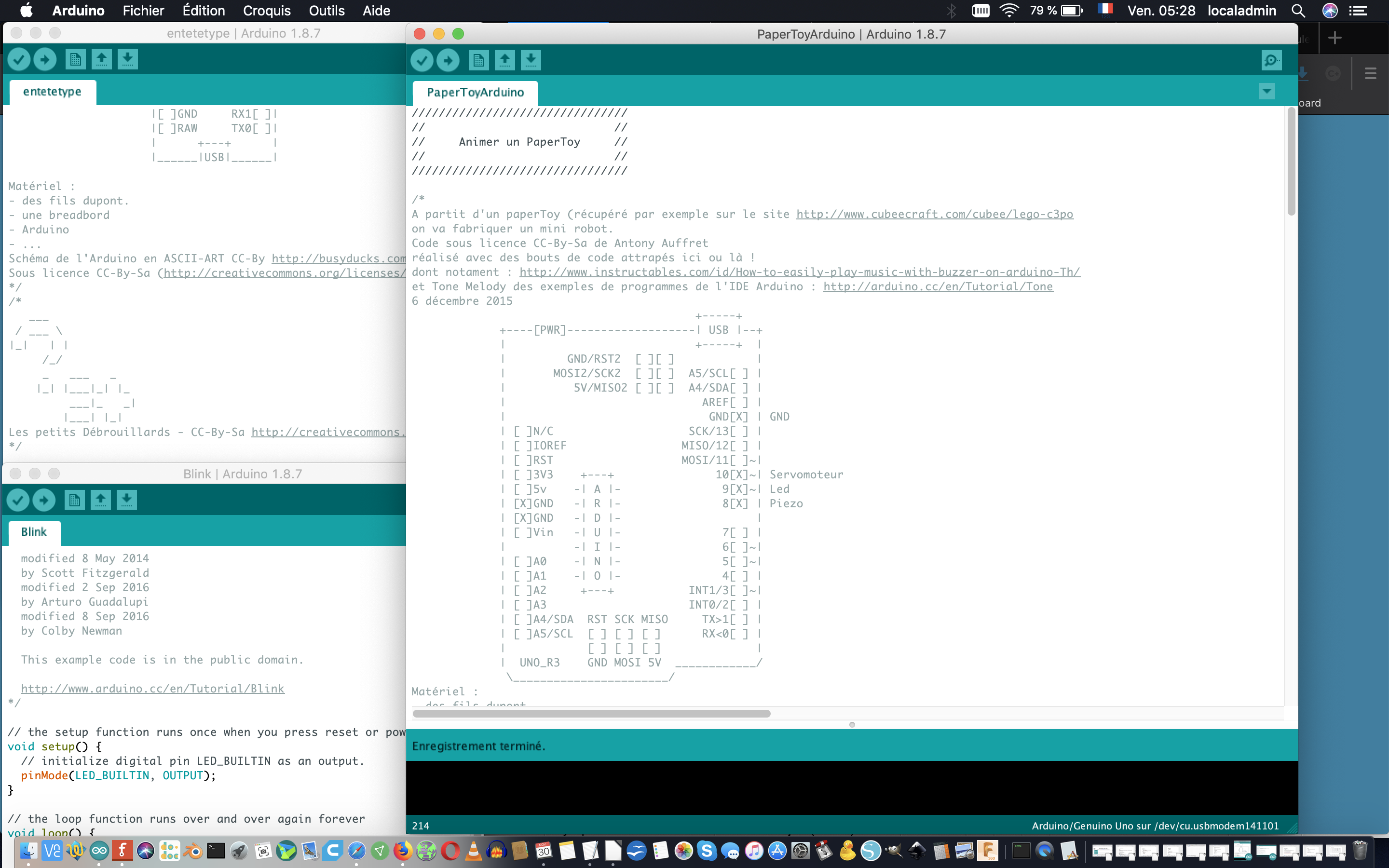

C'est le logiciel libre développé pour accompagner et programmer la carte Arduino
Ordinateur 

Dès sa mise sous tension, un ordinateur exécute, l'une après l'autre, des instructions qui lui font lire, manipuler, puis réécrire un ensemble de données auquel il a accès. Des tests et des sauts conditionnels permettent de changer d'instruction suivante, et donc d'agir différemment en fonction des données ou des nécessités du moment. Les données à manipuler sont obtenues, soit par la lecture de mémoires, soit par la lecture de composants d'interface (périphériques) qui représentent des données physiques extérieures en valeurs binaires (déplacement d'une souris, touche appuyée sur un clavier, température, vitesse, compression...). Une fois utilisées, ou manipulées, les données sont réécrites, soit dans des mémoires, soit dans des composants qui peuvent transformer une valeur binaire en une action physique (écriture sur une imprimante ou sur un moniteur, accélération ou freinage d'un véhicule, changement de température d'un four ...). L'ordinateur peut aussi répondre à des interruptions qui lui permettent d’exécuter des programmes de réponses spécifiques à chacune, puis de reprendre l’exécution séquentielle du programme interrompu. La technique actuelle des ordinateurs date du milieu du xxe siècle. Ils peuvent être classés selon plusieurs critères1 (domaine d'application, taille ou architecture).
Film étirable 

Un film étirable, aussi appelé à tort cellophane, est une pellicule de matière plastique, ductile, transparente et adhérente, utilisée pour la protection des denrées alimentaires.
Breadboard 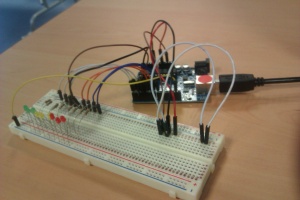

L'avantage de ce système est d'être totalement réutilisable, car il ne nécessite pas de soudure. Ce dernier point distingue les platines Labdec des stripboards (ou veroboards), des perfboards ou des circuits imprimés qui sont, eux, utilisés pour réaliser des prototypes permanents et que l'on sera donc moins à même de démonter. On peut de plus câbler sur une platine Labdec une grande variété de composants afin de réaliser des circuits électroniques, du plus simple circuit jusqu'au microprocesseur.
Règle
[[File:]]
Au sens matériel, une règle est un instrument de mesure gradué à arêtes rectilignes servant à tracer des traits droits ou à mesurer des longueurs.
Potentiomètre 

Un potentiomètre est un type de résistance variable à trois bornes, dont une est reliée à un curseur se déplaçant sur une piste résistante terminée par les deux autres bornes.
Étape 1 - Relier
On relie :
- Vcc du capteur à 5V
- GND du capteur et le fil noir du buzzer au GND de la carte
- le fil rouge du buzzer à la broche 12 de la carte arduino
- Trig du capteur à la broche 8
- Echo du capteur à la broche 7

Étape 2 - Le code
int trig = 8; int echo = 7; long lecture_echo; long cm; int sortie_son = 12; int offset = 0; void setup() { pinMode(trig, OUTPUT); digitalWrite(trig, LOW); pinMode(echo, INPUT); pinMode(sortie_son,OUTPUT); } void loop() { digitalWrite(trig, HIGH); delayMicroseconds(10); digitalWrite(trig, LOW); lecture_echo = pulseIn(echo, HIGH); cm = (lecture_echo / 58) + offset; delay(200); if(cm<=5) { tone(sortie_son,150); } else if((cm>5)&&(cm<=10)) { tone(sortie_son,300); } else if((cm>10)&&(cm<=15)) { tone(sortie_son,500); } else if((cm>15)&&(cm<=20)) { tone(sortie_son,700); } else if((cm>20)&&(cm<=25)) { tone(sortie_son,900); } else if((cm>25)&&(cm<=30)) { tone(sortie_son,1100); } else { noTone(sortie_son); } }
Étape 3 - Variante
On restera sur le principe du piano invisible en ajoutant la possibilité de faire varier les fréquences à l'aide de potentiomètre.
On ajoute au montage précédent les 6 potentiomètres relié sur :
- une patte sur une des entrées analogiques (A0, A1, A2, ...) celle du milieu
- une patte sur le 5V (celle de droite)
- une patte sur le GND (celle de gauche)

Étape 4 - Le code
Le code
int trig = 8;
int echo = 7;
long lecture_echo;
long cm;
int sortie_son = 12;
int offset = 0;
void setup() {
pinMode(trig, OUTPUT);
digitalWrite(trig, LOW);
pinMode(echo, INPUT);
pinMode(sortie_son,OUTPUT);
}
void loop() {
digitalWrite(trig, HIGH);
delayMicroseconds(10);
digitalWrite(trig, LOW);
lecture_echo = pulseIn(echo, HIGH);
cm = (lecture_echo / 58) + offset;
delay(200);
if(cm<=5) {
tone(sortie_son,analogRead(A0));
}
else if((cm>5)&&(cm<=10)) {
tone(sortie_son,analogRead(A1));
}
else if((cm>10)&&(cm<=15)) {
tone(sortie_son,analogRead(A2));
}
else if((cm>15)&&(cm<=20)) {
tone(sortie_son,analogRead(A3));
}
else if((cm>20)&&(cm<=25)) {
tone(sortie_son,analogRead(A4));
}
else if((cm>25)&&(cm<=30)) {
tone(sortie_son,analogRead(A5));
}
else {
noTone(sortie_son);
}
Comment ça marche ?
Observations : que voit-on ?
On voit que si on met un obstacle devant le capteur, l'arduino envoie un son au buzzer : selon où on se met par rapport au capteur, le son change.
Pour la variante : Si l'on tourne un des potentiomètre, la fréquence du son varie.
Explications
Le capteur utilisé est un capteur à ultrason : lorsqu'il détecte un obstacle il va renvoyer au programme la distance qui le sépare de l'obstacle. Selon la distance renvoyée, la carte va envoyer une fréquence au buzzer.
Pour modifier la fréquence ou la distance, il faut modifier les dernières lignes du programme :
- if((cm>20)&&(cm<=25)) signifie "si cm (la distance donc) est comprise entre 20 et 25"
- tone(sortie_son,1100); signifie "envoyé un son à "sortie_son" de fréquence 1100"
- noTone(sortie_son); signifie "arrêter l'envoie de son à "sortie_son" "
Il peut arriver qu'il faille réaliser un calibrage du capteur, pour cela on va jouer sur l'offset (la marge d'erreur). Pour cela, on va utiliser la règle afin de voir si les distances correspondent. Dans le cas contraire, on ajoutera ou soustraira l'erreur :
int offset = 0;
Il suffit de changer ici la valeur et le signe de :
cm = (lecture_echo / 58) + offset;
Plus d'explications
Pour la variante
Un potentiomètre est une résistance variable : le courant va passer dedans et être atténué permettant de moduler le signal. On peut ainsi aller de 0 à 1023 en règle général. Ce chiffre est récupéré à l'aide la fonction "analogRead", il est ensuite substitué à la fréquence.
On peut lire des sons MP3 sur arduino à l'aide d'un shield spécifique mais est-il possible d'obtenir des sons plus agréables sans ajout d'un shield ?
Applications : dans la vie de tous les jours
Les capteurs à ultrason sont utilisés dans de nombreux dispositifs, l'expérience peut servir d'introduction à la programmation de capteurs (en vu d'un robot par exemple) ou en finalité d'une séance sur la musique.
Éléments pédagogiques
Pistes pour animer l'expérience
Plutôt dans un atelier avec des ordinateurs disposant du logiciel arduino.
Dernière modification 15/10/2019 par user:Pierreb.
Draft